RoboFabric: il tessuto ibrido che cambia rigidità in un istante

I ricercatori della Nanyang Technological University di Singapore hanno presentato un innovativo tessuto in grado di modificare le sue proprietà, ispirandosi alle scaglie dei pangolini e degli armadilli.
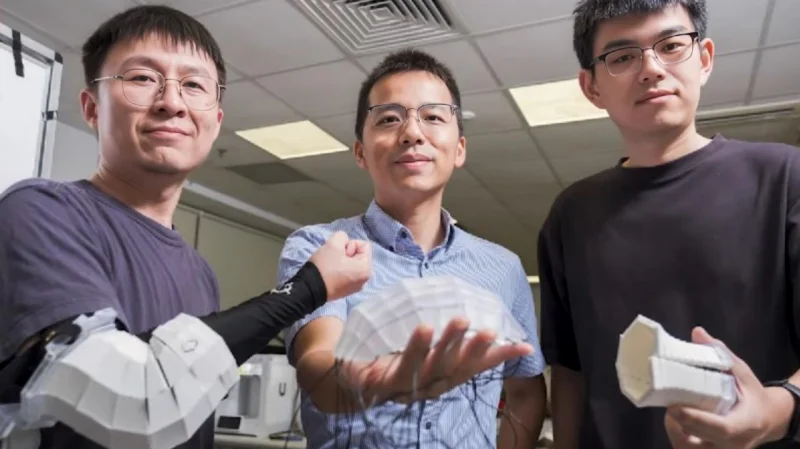
Questo materiale, denominato RoboFabric, è stato realizzato creando una rete di piastrelle collegate da fibre metalliche, stampata in 3D. Quando le fibre sono libere, le piastrelle si muovono facilmente, come le maglie di una catena. Ma quando le fibre vengono compresse, la rigidità del materiale aumenta di ben 350 volte.
Leggi anche:
La caratteristica più interessante di RoboFabric è la sua capacità di ridurre del 40% la forza muscolare necessaria per sollevare oggetti. Questa scoperta potrebbe rivelarsi estremamente utile per le persone con disturbi motori, come i pazienti affetti da morbo di Parkinson.
Gli scienziati hanno spiegato che i componenti di RoboFabric sono facili da produrre. Basta scansionare l’arto desiderato, dividere il modello 3D in tessere geometriche e avviare il processo di stampa, che richiede meno di un’ora.
Questa straordinaria capacità di modificare lo stato del materiale può essere sfruttata anche per creare robot mobili con maggiore flessibilità e adattabilità. In futuro, lo sviluppo di RoboFabric potrebbe essere utilizzato per realizzare bende ibride in grado di supportare la funzione articolare.
Questa innovazione, ispirata dalla natura, rappresenta un importante passo avanti nel campo dei materiali intelligenti e della robotica biomimetica.
Ti potrebbe interessare:
Segui guruhitech su:
- Google News: bit.ly/gurugooglenews
- Telegram: t.me/guruhitech
- X (Twitter): x.com/guruhitech1
- Bluesky: bsky.app/profile/guruhitech.bsky.social
- GETTR: gettr.com/user/guruhitech
- Rumble: rumble.com/user/guruhitech
- VKontakte: vk.com/guruhitech
- MeWe: mewe.com/i/guruhitech
- Skype: live:.cid.d4cf3836b772da8a
- WhatsApp: bit.ly/whatsappguruhitech
Esprimi il tuo parere!
Ti è piaciuta questa notizia? Lascia un commento nell’apposita sezione che trovi più in basso e se ti va, iscriviti alla newsletter.
Per qualsiasi domanda, informazione o assistenza nel mondo della tecnologia, puoi inviare una email all’indirizzo [email protected].
Scopri di più da GuruHiTech
Abbonati per ricevere gli ultimi articoli inviati alla tua e-mail.